
GPM Core Observatory
GPM Spacecraft and Instruments
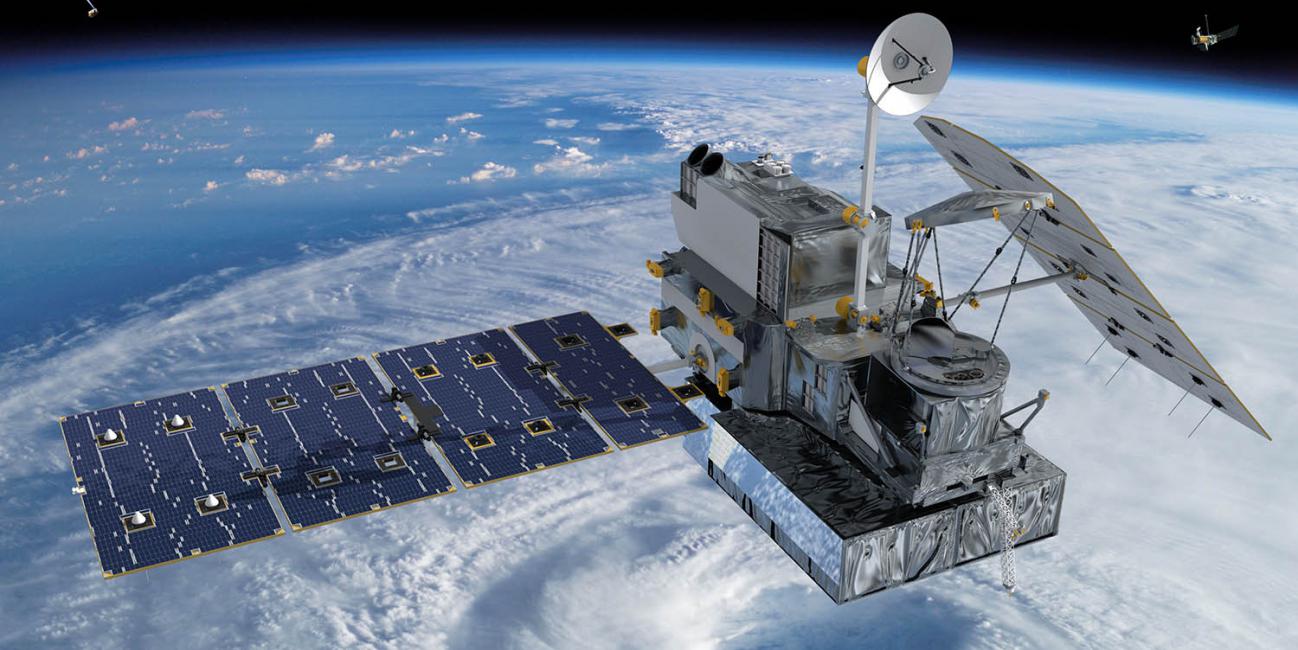
The Global Precipitation Measurement (GPM) Core Observatory satellite operates in low Earth orbit, carrying two instruments for measuring Earth's precipitation and serving as a calibration standard for other members of the GPM satellite constellation. The satellite was developed and tested in-house at NASA Goddard Space Flight Center and launched from Tanegashima Space Center, Japan, on February 27th, 2014.
The GPM Core Observatory orbits Earth at an inclination of 65 degrees, which enables it to cut across the orbits of other microwave radiometers and sample the latitudes where nearly all precipitation occurs. A non-sun-synchronous orbit that takes it around Earth roughly 16 times per day allows it to sample precipitation at different times of the day. Data is transmitted continuously to ground systems on Earth by the Tracking and Data Relay Satellite (TDRS) communications network.
GPM carries a passive multi-channel conical-scanning microwave radiometer called the GPM Microwave Imager (GMI) that can measure light to heavy precipitation, and an active Dual-frequency Precipitation Radar (DPR) which can measure precipitation characteristics in the atmospheric column in three dimensions.
Learn more about GPM's instruments:
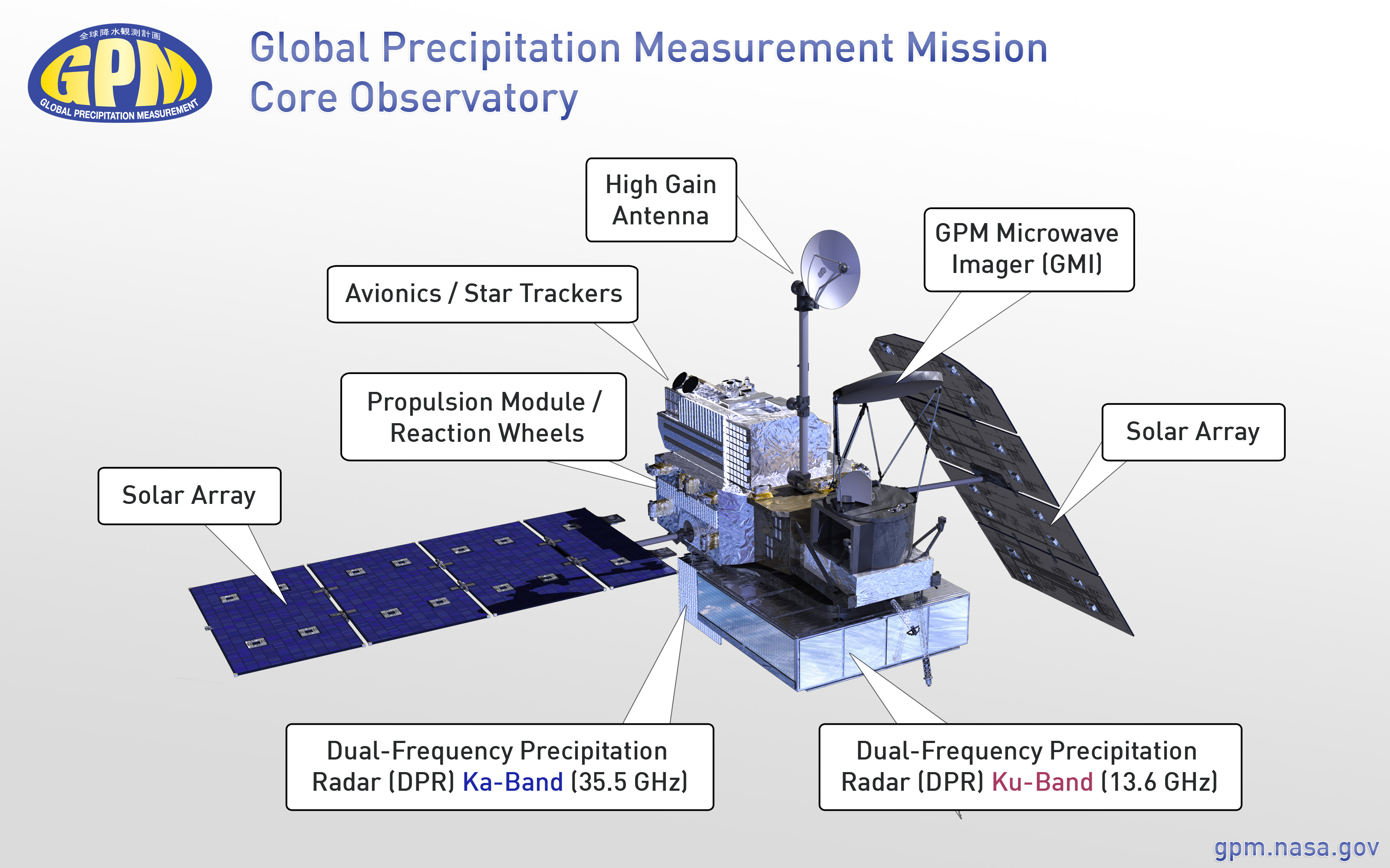
A diagram of the GPM Core Observatory showing the GMI and DPR instruments and other important hardware components.
Satellite Details
Launch Date: 1:37pm EST, February 27th, 2014
Orbit: Circular, non-sun-synchronous, with an inclination of 65 degrees to the Equator and a precession period of about 81 days for the nodes with respect to the sun (affecting the time of day of sampling at different latitudes)
Orbit Altitude: 408 km +/- 11 km (varies between 397 - 419 km)
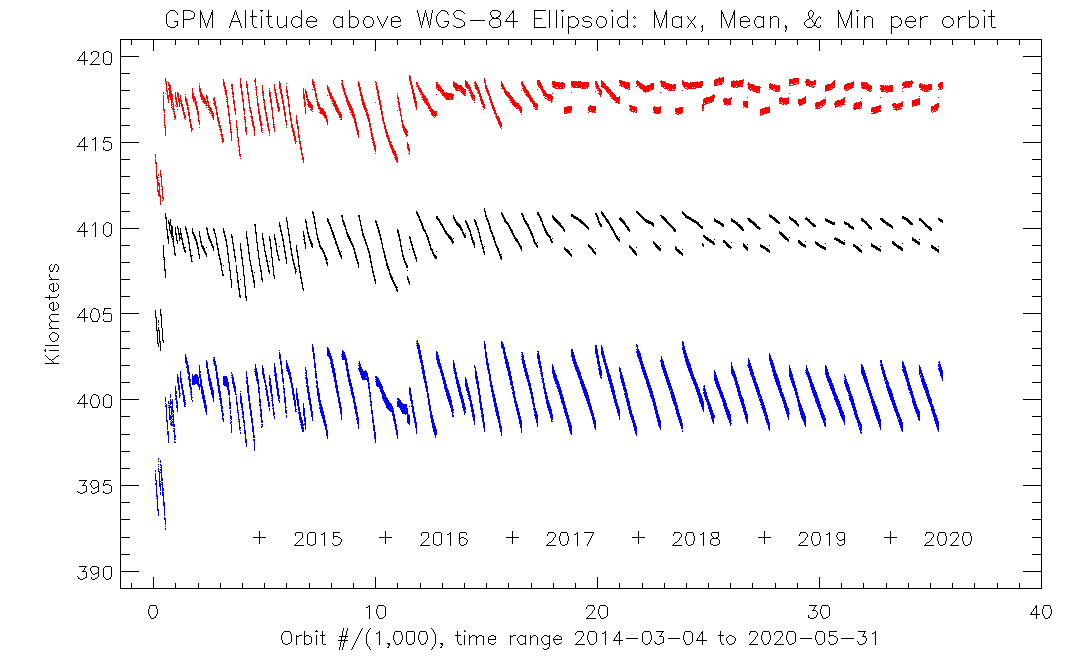
This graph shows the maximum (red), mean (black), and minimum (blue) altitude of the GPM Core Observatory satellite, by orbit number, from 3/4/2014 to 5/31/2020. Credit: Steve Bilanow, NASA Precipitation Processing System
Instrument Swaths:
- GPM Microwave Imager (GMI): 904 km swath
- Dual-frequency Precipitation Radar (DPR):
- Ku-band Rada: 245 kilometer swath
- Ka-band Radar: 245 kilometer swath (after May 2018), 120 kilometer swath (before May 2018)

Photograph of the GPM Core Observatory spacecraft bus under construction at NASA Goddard Space Flight Center.
Structural / Mechanical Subsystem
The Spacecraft Structural/Mechanical Subsystem provides the support structure for Observatory components. The support structure provides suitable orientation and field-of-view for payload instrument operation and locations for spacecraft bus components.
Solar Array Drive and Deployment Subsystem
The SADDS Subsystem provides the solar array, control of the solar array drive motor, and initial deployment of the solar panels.
High Gain Antenna Subsystem (HGAS)
The HGAS Subsystem provides gimbaled support for the High Gain Antenna directional pointing.
Thermal Control Subsystem (TCS)
The TCS maintains the Observatory thermal environment by means of active and passive control. The DPR and GMI to spacecraft interfaces are controlled to maintain proper sensor performance.
Power Subsystem
The Power Subsystem acquires solar power from the solar array, controls the recharge of the spacecraft battery, and distributes power to Observatory components through the power supply electronics.
Propulsion Subsystem
The Propulsion Subsystem provides the thrust capability to optimize the Observatory orbit after separation from the launch vehicle, provides orbit maintenance, corrects anomalous spacecraft attitude control rates if needed, and de-orbits the Observatory through a controlled atmospheric re-entry.
Guidance, Navigation and Control (GN&C) Subsystem
The GN&C Subsystem provides a stable attitude orientation for the Observatory within the accuracy and knowledge requirements needed for the instruments.
RF Communications (RF Comm) Subsystem
The RF Communications Subsystem provides S-Band radio frequency (RF) communications between the GPM Core Observatory and the GPM ground systems. The High Gain S-Band Antenna provides for continuous real time GMI and DPR science data transmission through the TDRSS Multiple Access (TDRSS-MA) service. The High Gain S-Band Antenna also provides for transmission of stored GMI and DPR science data and Observatory housekeeping status on a scheduled basis utilizing the TDRSS Single Access (TDRSS-SA) service. Contingency communications are provided by omni directional S-Band antenna links through NASA’s Near Earth Network (NEN).
Command and Data Handling (C&DH) Subsystem
The C&DH Subsystem performs Observatory command and control processing, providing control commands to the Observatory instruments and components. The C&DH Subsystem collects telemetry and data from the Observatory instruments and all components for processing and transmission to ground operations.
Safety/Mechanisms and Attitude Control (SMAC) Subsystem
The Safety/Mechanisms and Attitude Control (SMAC) Subsystem provides the generation of control signals and return status information for Observatory attitude sensors and actuators, HGAS and SADDS and operation and thruster operation through the Mechanisms, Attitude and Control Electronics (MACE), and the Propulsion Interface Electronics (PIE). The SMAC Subsystem provides the generation of control signals and return status information for Observatory HGAS and SAD deployment through the Deployment Firing Unit (DFU).
Electrical Harness
The Observatory Electrical Harness provides electrical interconnections for power, data, command and telemetry between Observatory components.
Flight Software
The Observatory Flight Software includes all programs, routines and symbolic languages that control the functioning of the Observatory and direct its operation.
Related Resources
What does building a satellite look like? In this timelapse of clean room footage from 2011 to 2014, watch the Global Precipitation Measurement mission's Core Observatory come together at NASA's Goddard Space Flight Center then fly across the Pacific where mission partner, the Japan Aerospace Exploration Agency, prepared and launched it into orbit, on Feb. 27, 2014.
The Global Precipitation Measurement mission observes rain and snowfall worldwide every three hours, which contributes to the monitoring and forecasting of weather events such as droughts, floods and hurricanes, as well scientific research on precipitation and climate change.
To see global data from the first six months of observations, visit: http://svs.gsfc.nasa.gov/goto?11764
For more information about building the GPM Core Observatory, visit: http://www.nasa.gov/content/goddard/r...
This video is public domain and can be downloaded at: http://svs.gsfc.nasa.gov/goto?11764
http://www.nasa.gov/gpm For more information: http://www.nasa.gov/content/goddard/r...
For the past three years, the Global Precipitation Measurement (GPM) Core Observatory has gone from components and assembly drawings to a fully functioning satellite at NASA's Goddard Space Flight Center in Greenbelt, Md. The satellite has now arrived in Japan, where it will lift off in early 2014.
The journey to the launch pad has been a long and painstaking process. It began with the most basic assembly of the satellite's frame and electrical system, continued through the integration of its two science instruments, and has now culminated in the completion of a dizzying array of environmental tests to check and recheck that GPM Core Observatory will survive its new home in orbit.
This video is public domain and can be downloaded at: http://svs.gsfc.nasa.gov/goto?11439