

Precipitation Algorithms
GPM relies on passive and active measurements to measure the properties of precipitation. Active radars like GPM's Dual-Frequency Precipitation Radar (DPR) transmit and receive signals reflected back to the radar. The signal returned to the radar receiver (called radar reflectivity) provides a measure of the size and number of rain/snow drops at multiple vertical layers in the cloud. On the other hand, passive precipitation radiometers like the GPM Microwave Imager (GMI) measure natural thermal radiation (called brightness temperatures) from the complete observational scene including snow, rain, clouds, and the Earth's surface.
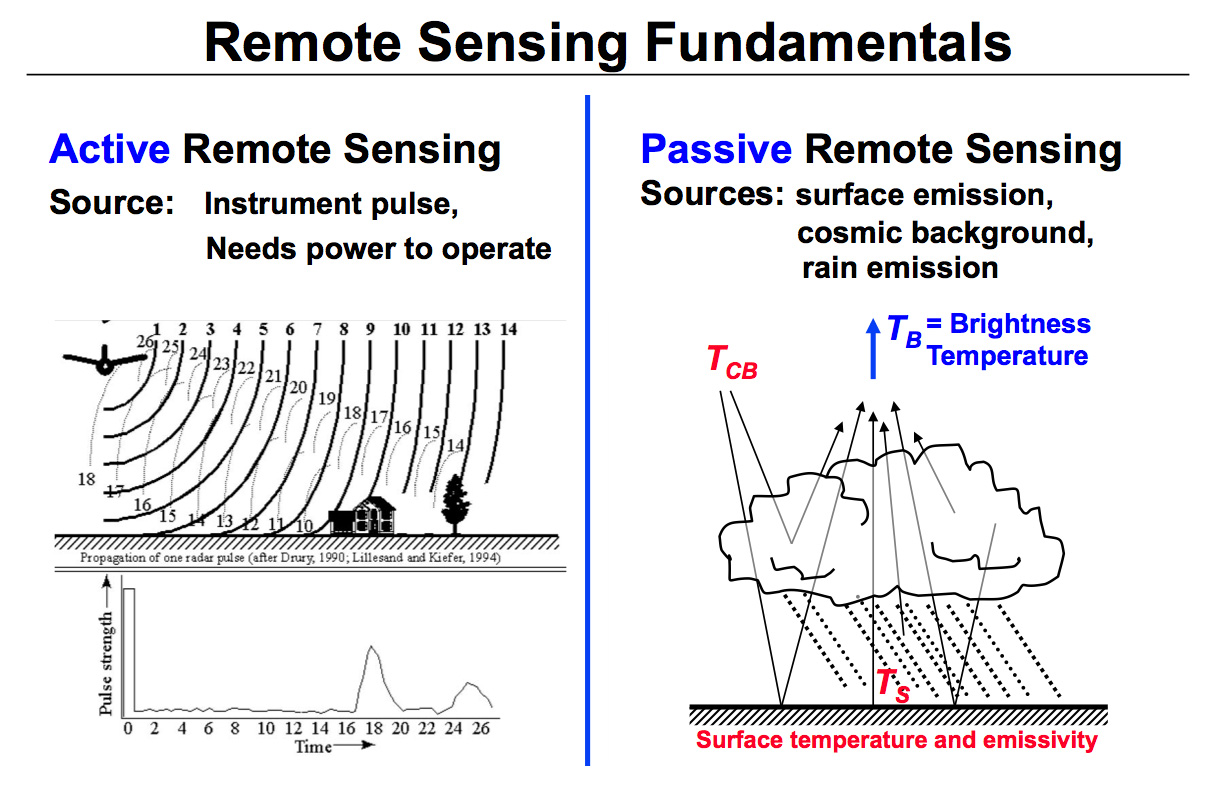
This diagram illustrates the differences between active and passive remote sensing. GPM relies on active and passive instruments to measure the properties of precipitation from space. Active radars, such as the GPM Dual Frequency Precipitation Radar, transmit and receive signals reflected back to the radar. The signal returned to the radar receiver (called radar reflectivity) provides a measure of the size and number of rain/snow drops at multiple vertical layers in the cloud (left figure). Passive precipitation radiometers such as the GPM Microwave Imager (GMI) measure natural thermal radiation (called brightness temperatures) from the complete observational scene including snow, rain, clouds, and the Earth's surface (right figure).
Precipitation retrievals using algorithms is the mathematical process of transforming the radar reflectivities (Z) and brightness temperatures (TB) into precipitation information. These scientific algorithms (that are converted to computer code) are designed by the PMM science team and processed (compiled and run) by the Precipitation Processing System (PPS). The algorithm performance is verified against Ground Validation (GV) data. In the algorithm development stage, GV data may be used to improve the science of the retrievals.
A brief animated look at the different types of remote sensing techniques that NASA uses to study the Earth.
This video is public domain and can be downloaded at: http://svs.gsfc.nasa.gov/goto?11877
Radar Algorithms
The unique function of precipitation radars is to provide the three-dimensional structure of rainfall, obtaining high quality rainfall estimates over ocean and land. Radar measurements are typically less sensitive to the surface and provide a nearly direct relationship between radar reflectivities and the physical characteristics of the rain and snow in a cloud. Because of the complexities of operating radar in space, limited channels (frequencies) are designed for the instruments.
The TRMM satellite had a single frequency radar at the Ku-band particularly sensitive to moderate rain rates. With a single frequency, the TRMM radar was able to retrieve one parameter of the rain drop particle size distribution (PSD); either the median drop size or the number of drops at each range gate bin in the vertically sampled profile (e.g., each 500 meters vertically in the cloud). The GPM Dual-frequency Precipitation Radar has two frequencies, Ku-band like TRMM, and Ka-band that is sensitive to lighter rain and falling snow; so both drop size and distribution of drops can be retrieved. The algorithm requires assumptions and corrections to retrieve precipitation structure, most notably to correct for attenuation. Attenuation refers to the weakening of a radar signal as it moves further away from the emitter and is scattered, reflected, and absorbed with by precipitation and other atmospheric particles. .
For the theoretical and mathematical details of the radar algorithm please review the GPM / DPR Level 2 Algorithm Theoretical Basis Document (ATBD)
Radiometer Algorithms
Precipitation radiometers provide additional degrees of freedom for interpreting rain and snow in clouds through the use of multiple passive frequencies (9 for TRMM and 13 for GPM). Brightness temperatures at each frequency are a measure of everything in their field of view. These frequencies transition from being sensitive to liquid rain drops at the low (10 GHz) end to being sensitive to the snow and ice particles at the middle (91 GHz) and high (183 GHz) end. So, simplifying, when there is liquid rain in the cloud column, the low frequency channels will respond; when there is snow the high frequency channels will respond; when there is clear air the brightness temperatures respond to the surface emission. In lighter rain, the surface emission may contaminate the brightness temperatures such that additional information is needed to constrain precipitation retrievals. Specifically, over land only the higher frequencies are operationally useful for estimating precipitation.
Concept for Generating the Observational Bayesian Database for GPM Algorithms

Retrievals from passive sensor measurements typically rely on a priori information, such as that used in Bayesian databases to reduce assumptions. This a priori information of multi-frequency brightness temperatures linked to precipitation profiles can be generated from models of clouds and calculations of brightness temperatures (as was done for TRMM) or from combined active-passive retrievals (as is done for GPM). The retrievals typically perform a best match between the multi-frequency observations and the Bayesian database TBs.
For the theoretical and mathematical details of the radiometer algorithm please review the GPM GPROF Algorithm Theoretical Basis Document (ATBD).
Combined Algorithms
The combined use of coincident active and passive microwave sensor data provides complementary information about the macro and microphysical processes of precipitating clouds which can be used to reduce uncertainties in combined radar/radiometer retrieval algorithms. In simple terms, the combined algorithms use the radiometer signal as a constraint on the attenuation seen by the radar.
The combined retrievals produce a hydrometeor profile, particle size distribution and surface parameters for which brightness temperatures and reflectivities are consistent with the actual satellite measurements. These combined products can be repackaged for use as retrieval Bayesian databases for multiple radiometers.
For the theoretical and mathematical details of the combined radar/radiometer algorithm please review the GPM Combined Radar-Radiometer Precipitation Algorithm Theoretical Basis Document (ATBD)
Multi-Satellite Algorithms
In addition to the TRMM and GPM satellites, numerous other satellites have carried and continue to carry precipitation-relevant sensors. In recent years the total number at any given time is 10-12.The goal of multi-satellite algorithms is to use “all” of the available quasi-global precipitation estimates computed from this international constellation of satellites to create a high-resolution precipitation product with complete coverage over the chosen domain and period of record (currently quasi-global, 2000-present).
Estimates based on microwave and combined radar / radiometer input data have higher quality due to the physically direct relationships that exist between precipitation and satellite data. Estimates based on thermal infrared sensors are lower quality due to the indirect relationship between infrared and precipitation, but they provide much more frequent coverage due to the sensors' position in geosynchronous orbit. One of the higher-quality data sets, currently the Combined Radar+Radiometer algorithm described above, is chosen as a standard, then all of the other precipitation data sets are calibrated to that standard. In the combination (currently on a 0.1° x 0.1° latitude/longitude grid every half hour), the higher-quality data are used as much as possible, while lower-quality data take a secondary role. Finally, in locations where they exist, primarily land areas, monthly precipitation gauge data are used to control the biases that satellite data sets can exhibit. The multi-satellite algorithm is run within several hours of the observation time, and then again after all data, including the monthly gauge, are received. The Integrated Multi-satellite Retrievals for GPM (IMERG) algorithm is run three times, first 4 hours after the observation time (IMERG Early), then after 14 hours (IMERG Late), and finally 3.5 months later (IMERG Final), after all data including monthly rain gauge data are received. The first product is more approximate, but enables important low latency uses such as flood analysis, while the second is more complete and supports next-day work, such as crop forecasting. The final product is considered the research-grade archival product intended for scientific analysis.
For the theoretical and mathematical details of the multi-satellite algorithm please review the GPM Integrated Multi-Satellite Retrievals for GPM (IMERG) Algorithm Theoretical Basis Document